

Inovativna invalidska kolica kojima se upravlja bez upotrebe ruku

Navigacija tradicionalnim invalidskim kolicima zahtijeva od korisnika značajnu snagu ruku i koordinaciju za upravljanje, često kočenjem jednog kotača dok pokreće drugi. To može biti iscrpljujuće i ograničava sposobnost obavljanja više zadataka.
Nova invalidska kolica koja su dizajnirali Reto Togni i Stefan Villiger iz Laboratorija za biomehaniku kretanja ETH Zürich ponovno zamišljaju proces, omogućujući korisnicima da upravljaju oslanjajući se na pomični naslon za leđa – razvoj koji bi mnogima mogao promijeniti mobilnost invalidskih kolica.
Problemi i rješenja
Primarni problem s tradicionalnim dizajnom invalidskih kolica leži u dva prednja kotača, koji se, poput kotača na kolicima za kupovinu, pasivno okreću. Iako omogućuju zakretanje, nedostaje im fiksni smjer, što predstavlja problem, osobito na nagnutim površinama.
Na primjer, kada se krećete neravnom stazom, kotačići prirodno skreću nizbrdo. Ovo nenamjerno zanošenje zahtijeva od korisnika stalno suprotno upravljanje, koristeći dodatnu energiju koja bi se inače mogla usmjeriti prema kretanju prema naprijed. Sadašnji sustav također opterećuje ramena, ruke i šake, povećavajući fizički teret tijekom vremena.
Nasuprot tome, ovaj inovativni dizajn invalidskih kolica eliminira potrebu za kontinuiranim protuupravljanjem integriranjem naslona za leđa koji korisnik naginje lijevo ili desno kako bi promijenio smjer. Umjesto da se oslanja na složenu elektroniku, ovaj dizajn je čisto mehanički, što omogućuje intuitivnu navigaciju bez ruku.
Pristup upravljanja temeljen na naslonu pruža dvije glavne prednosti
Kada se korisnik nasloni na naslon za leđa udesno ili ulijevo, on pokreće mehanizam povezivanja koji usmjerava prednje kotače u odabranom smjeru, dopuštajući im da zadrže svoj položaj umjesto da se kolebaju. Kočenje, međutim, ostaje isto kao kod tradicionalnih invalidskih kolica, izvodi se hvatanjem i usporavanjem stražnjih kotača.
Pristup upravljanja temeljen na naslonu pruža dvije glavne prednosti: veću učinkovitost i fleksibilnost u obavljanju više zadataka. Sa sustavom upravljanja kojim upravlja naslon za leđa, korisnici mogu rezervirati jednu ruku za pogon dok drugu koriste za rukovanje pametnim telefonom, šalicom kave ili bilo kojim drugim predmetom koji bi mogli nositi.
“Još uvijek postoje trenuci kada smo praktički oboreni s nogu jednostavnošću naše ideje – i brojnim prednostima koje nudi“, govori Togni, uz osjećaj zadovoljstva koji je proizašao iz spoznaje potencijala sustava.

Testiranje na dobrovoljcima
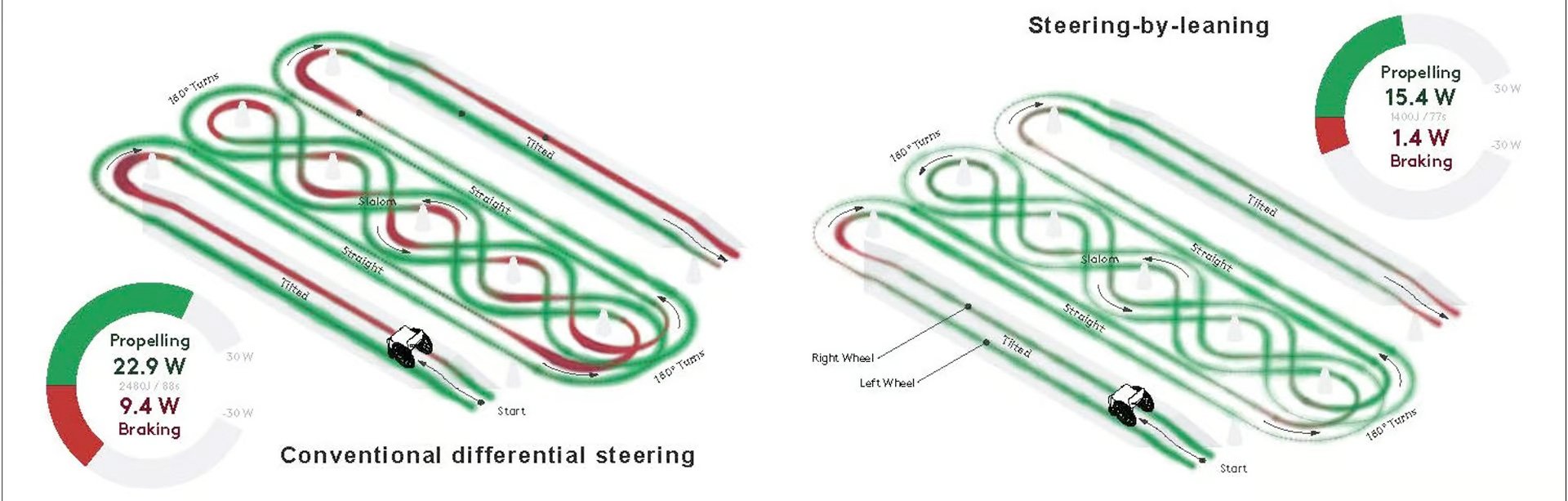
Kako bi procijenili ovu inovaciju, Togni i Villiger angažirali su 29 dobrovoljaca da upravljaju stazom s preprekama, prvo u standardnim invalidskim kolicima, a zatim u svom novodizajniranom modelu. Sa senzorima postavljenim na stražnje pogonske kotače, istraživači su mjerili potrošnju energije u šest vožnji.
Rezultati su pokazali da su sudionici trošili znatno manje energije kada su koristili invalidska kolica s upravljanjem naslonom za leđa.
Osim smanjenja potrošnje energije, novi dizajn invalidskih kolica omogućio je korisnicima brže kretanje ravnim stazama uz manje napora. Jedini mali nedostatak novog sustava je njegova smanjena sposobnost okretanja na mjestu – značajka koju su dizajneri riješili dodavanjem poluge. Ova poluga isključuje sustav upravljanja, dopuštajući prednjim kotačima da se slobodno okreću prema potrebi.
Togni i Villiger, koji sada planiraju komercijalizirati svoj dizajn kroz svoju ETH Zurich spinoff tvrtku Versive, predviđaju izlazak proizvoda na tržište do sredine 2027. godine. Cilj im je ovu tehnologiju učiniti dostupnom široj publici, s potencijalnim primjenama u različitim okruženjima koja zahtijevaju pouzdana rješenja mobilnosti prilagođena korisniku.
Pogledajte ova invalidska kolica na djelu u videu u nastavku.

Izvor: ETH Zurich




{kind=link}